あやの
NゲージをベースとしたDCCについての日記を 書いています。 ある程度貯まりましたら、鉄道模型のDCCのまとめサイトに まとめています。 借りている容量が最大に達しましたので、移転します。 ★移転先:http://maison-dcc.sblo.jp/

×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
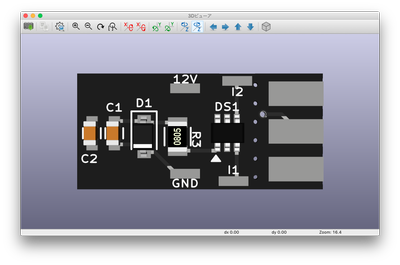
KiCadの3Dビュワーでいつも板厚が1.6mmでなんだかなーと思っていましたが、
板厚の設定が変更できることがわかりました。
デザインルール→レイヤセットアップで板厚の変更ができます。

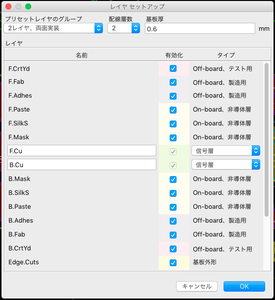
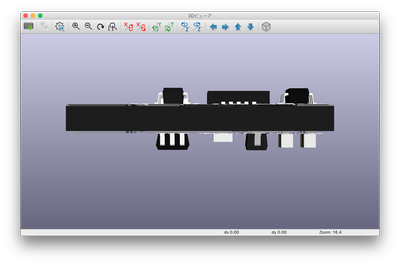
1.6mm設定
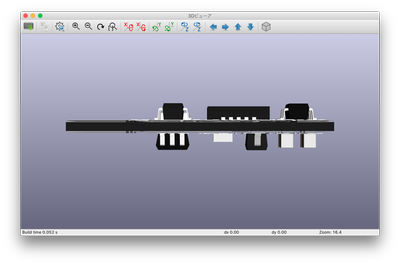
0.6mm設定。うすい!
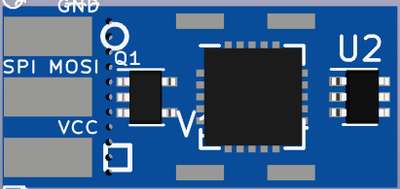
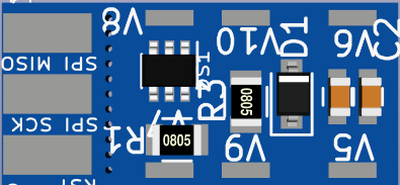
PADの位置を色々検討していまして、上下に配置してみてます。
O1とO2は、両極性のFX1,FX2 O3,O4はFX3とFX4
V1とV2は12V出力
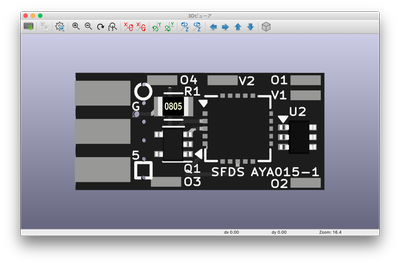
I1とI2はRAIL、12VとGNDはTOMA-RUN用端子です。
板厚の設定が変更できることがわかりました。
デザインルール→レイヤセットアップで板厚の変更ができます。
1.6mm設定
0.6mm設定。うすい!
PADの位置を色々検討していまして、上下に配置してみてます。
O1とO2は、両極性のFX1,FX2 O3,O4はFX3とFX4
V1とV2は12V出力
I1とI2はRAIL、12VとGNDはTOMA-RUN用端子です。
 [2回]
[2回]
PR
ちょこっとSmileFunctionDecoderSlim(両極性+2FX FunctionDecoder)に向かいました。
FL12と比べると十分に小さいでしょ!

パターンは明日検討してみるかな。
FL12と比べると十分に小さいでしょ!
パターンは明日検討してみるかな。
[2回]
早起きして、SmileFunctionDecoderキットの部品動作確認の為、
試しに5枚実装してみた。
両面に実装して約2時間。検査も多分1枚30分くらいかかりそう。
昼の仕事のローディングでやったら、原価すごいことになりますw
家内制手工業だと時給2000円は欲しいな(ぼりすぎ?)

シリコンマットのお皿に、部品をあらかじめ出しておきます。
余計な所にハンダが付かない様にマスキングして作業開始!

抵抗アレイとかDual FETとかめんどくさいやつ

抵抗アレイは、全pinにハンダ持っちゃって、ハンダ網で余計なハンダを
吸い取った方が簡単です。

完成〜。
試しに5枚実装してみた。
両面に実装して約2時間。検査も多分1枚30分くらいかかりそう。
昼の仕事のローディングでやったら、原価すごいことになりますw
家内制手工業だと時給2000円は欲しいな(ぼりすぎ?)
シリコンマットのお皿に、部品をあらかじめ出しておきます。
余計な所にハンダが付かない様にマスキングして作業開始!
抵抗アレイとかDual FETとかめんどくさいやつ
抵抗アレイは、全pinにハンダ持っちゃって、ハンダ網で余計なハンダを
吸い取った方が簡単です。
完成〜。
[1回]
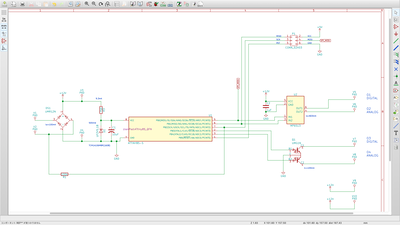
最近のDecoder基板の薄型化に触発されて板厚0.6mmバージョンの
SmileFunctionDecoderを検討しています。
回路はこんな感じ。
CPU Attiny85
両極性端子(ヘッドライト:調光可能/テールライト:On/Offのみ) 2FXとしても使用可能
2FX(室内灯とかパンタスパークとか車掌灯など)
LED用電源は12V
LED用の電流制限抵抗は載せたい・・・

新しい事は
ブリッジダイオードはRoHMのUMR12N SOT-363パッケージで小型!
5V電源はツェナーダイオードを使用
両極性ドライバとしてHブリッジのMP6513(モータは動かせないよ!)
2FXドライバとしてRoHMのUMG1Nのデジタルトランジスタ


この抵抗はLED用の電流制限抵抗です。


大きさは、25.4mm x 7.62mm 厚さは1.6mmくらい。
SmileConnectorが不要な方はミシン目から切り離せる感じに。
もう一つのパターンは、部品を両面に実装して、長手方向をシェイプアップした
タイプ。
大きさは、15.494mm x 7.62mm 厚さは3.2mmくらい。


【追記】
議論用のスレッドを立ち上げました!
SmileFunctionDecoderを検討しています。
回路はこんな感じ。
CPU Attiny85
両極性端子(ヘッドライト:調光可能/テールライト:On/Offのみ) 2FXとしても使用可能
2FX(室内灯とかパンタスパークとか車掌灯など)
LED用電源は12V
LED用の電流制限抵抗は載せたい・・・
新しい事は
ブリッジダイオードはRoHMのUMR12N SOT-363パッケージで小型!
5V電源はツェナーダイオードを使用
両極性ドライバとしてHブリッジのMP6513(モータは動かせないよ!)
2FXドライバとしてRoHMのUMG1Nのデジタルトランジスタ
この抵抗はLED用の電流制限抵抗です。
大きさは、25.4mm x 7.62mm 厚さは1.6mmくらい。
SmileConnectorが不要な方はミシン目から切り離せる感じに。
もう一つのパターンは、部品を両面に実装して、長手方向をシェイプアップした
タイプ。
大きさは、15.494mm x 7.62mm 厚さは3.2mmくらい。
【追記】
議論用のスレッドを立ち上げました!
[2回]
ファンクッションは当初
出発時 F4
PM9 F5
AM0 F6
AM3 F7
AM6 F8
ヤード F9
で作りましたが、DCS50k がF9認識しなかったので、AM6無くしてF8 ヤードになっています。
また、DCS50Kは電源を入れ直しても、前回のファンクッションを覚えている様で
いろいろ対策入れました。
勝手にF4が始まるのはガードしきれていません。
ヤードはランダムに点灯する様に作ってみました。
出発時 F4
PM9 F5
AM0 F6
AM3 F7
AM6 F8
ヤード F9
で作りましたが、DCS50k がF9認識しなかったので、AM6無くしてF8 ヤードになっています。
また、DCS50Kは電源を入れ直しても、前回のファンクッションを覚えている様で
いろいろ対策入れました。
勝手にF4が始まるのはガードしきれていません。
ヤードはランダムに点灯する様に作ってみました。
void Elm_Control(){
static char state = 0; // ステート
static char lamp[8]={0,0,0,0,0,0,0};
static char sw = 0;
static long cnt=0;
long selL =0;
switch(state){
case 0:
if(gState_F4 == 0){
lamp[0] = 0;
} else {
lamp[0] = 1;
}
if(gState_F5 == 0){
lamp[1] = 0;
} else {
lamp[1] = 1;
}
if(gState_F6 == 0){
lamp[2] = 0;
} else {
lamp[2] = 1;
}
if(gState_F7 == 0){
lamp[3] = 0;
} else {
lamp[3] = 1;
}
if(gState_F8 == 0){
lamp[4] = 0;
} else {
lamp[4] = 1;
}
if(gState_F9 == 0){
lamp[5] = 0;
} else {
lamp[5] = 1;
}
digitalWrite(O1, LOW);
digitalWrite(O2, LOW);
digitalWrite(O3, LOW);
digitalWrite(O4, LOW);
cnt ++;
if (cnt==10){
state = 1;
cnt =0;
}
break;
case 1:
if(gState_F4 != lamp[0]){
// F4 受信時の処理
// 出発時
digitalWrite(O1, LOW);
digitalWrite(O2, HIGH);
digitalWrite(O3, LOW);
digitalWrite(O4, LOW);
lamp[0] = gState_F4;
break;
}
if(gState_F5 != lamp[1]){
// F5 受信時の処理
// PM9時
digitalWrite(O1, HIGH);
digitalWrite(O2, HIGH);
digitalWrite(O3, HIGH);
digitalWrite(O4, HIGH);
lamp[1] = gState_F5;
break;
}
if(gState_F6 != lamp[2]){
// F6 受信時の処理
// AM0時
digitalWrite(O1, HIGH);
digitalWrite(O2, HIGH);
digitalWrite(O3, HIGH);
digitalWrite(O4, LOW);
analogWrite(O4, 10);
lamp[2] = gState_F6;
break;
}
if(gState_F7 != lamp[3]){
// F7 受信時の処理
// AM0時
digitalWrite(O1, HIGH);
digitalWrite(O2, HIGH);
digitalWrite(O3, HIGH);
digitalWrite(O4, LOW);
lamp[3] = gState_F7;
break;
}
if(gState_F8 != lamp[4]){
// F8 受信時の処理
// AM6時
digitalWrite(O1, LOW);
digitalWrite(O2, LOW);
digitalWrite(O3, LOW);
digitalWrite(O4, LOW);
state = 2;
lamp[4] = gState_F8;
break;
}
if(gState_F9 != lamp[5]){
// F9 受信時の処理
// ヤード
digitalWrite(O1, LOW);
digitalWrite(O2, LOW);
digitalWrite(O3, LOW);
digitalWrite(O4, LOW);
state=2;
lamp[5] = gState_F9;
break;
}
break;
case 2:
if(gState_F4 != lamp[0]){
state =1;
break;
}
selL = random(3);// 0 - 2
cnt = random(1,5);
FlashTimer = millis();
switch(selL){
case 0:
state = 3;
break;
case 1:
state = 4;
break;
case 2:
state = 5;
default:
break;
}
break;
case 3:
if((millis()-FlashTimer) >= 200){
FlashTimer = millis();
if(sw==0) {
digitalWrite(O1, LOW);
sw = 1;
cnt--;
} else {
digitalWrite(O1, HIGH);
sw = 0;
}
if(cnt==0){
state = 2;
}
}
break;
case 4:
if((millis()-FlashTimer) >= 300){
FlashTimer = millis();
if(sw==0) {
digitalWrite(O3, LOW);
cnt--;
sw = 1;
} else {
digitalWrite(O3, HIGH);
sw = 0;
}
if(cnt==0){
state = 2;
}
}
break;
case 5:
if((millis()-FlashTimer) >= 400){
FlashTimer = millis();
if(sw==0) {
digitalWrite(O4, LOW);
sw = 1;
cnt--;
} else{
digitalWrite(O4, HIGH);
sw = 0;
}
if(cnt==0){
state = 2;
}
}
break;
default:
break;
}
}
[0回]
ブログ内検索
カテゴリー
最新記事
(12/31)
(12/31)
(12/29)
(12/23)
(12/18)
リンク
プロフィール
HN:
あやのすけ
性別:
非公開