あやの
NゲージをベースとしたDCCについての日記を 書いています。 ある程度貯まりましたら、鉄道模型のDCCのまとめサイトに まとめています。 借りている容量が最大に達しましたので、移転します。 ★移転先:http://maison-dcc.sblo.jp/

×
[PR]上記の広告は3ヶ月以上新規記事投稿のないブログに表示されています。新しい記事を書く事で広告が消えます。
今日も、訳の分からない書き込みです。
■やった事
サーボモーターにトルクを掛けた時の電流波形を取得する。
■わかった事
トルクを掛けている時は、5V-100mA以上流れている事。
波形ではイマイチ分からなかった。
■次やる事
SmileFunctionDecoder用サーボモータ用スケッチのバグ取り。
以前にAllegroのACS712というホール素子タイプの電流センサをゲットしました。
検出回路と絶縁されているので、PWM波形と電流を一緒に観測する事が
できたりして、色々便利そうです。
0Aで、VIOUT端子に2.5Vが出力されています。
↓アマゾンで買えます。レンジが色々あるのですが、5Aタイプが良いかな。


ごちゃごちゃしていますが、SmileFunctionDecoderにサーボモータの
HK-5320の電源ラインに、ACS712電流センサを割り込ませてあります。
VIOUTに電圧テスターと、デジタルオシロで波形を観測しています。

ピーと音がするACアダプタだなーと思って、5Vラインを見たら、
リップルのすごいこと・・・
負荷が軽いから、こんなもんでしょうか・・・↓これを使うのをやめて、もう一つ5Vの
ACアダプタがあったので、そっちを使いました。

もう一個のACアダプタは若干5Vを超えているので、0A時にVIOUT端子は2.780Vでした。

サーボモータを手でトルクをかけて「み゛ー」とさせると、2.793Vになります。
ACS712は、185mVで1Aなので、軽く100mA以上流れています(^^;
テスターは実効値表示なのでピーク電流はもっと流れているでしょう・・・
SmileFunctionDecoderの三端子レギュレータが熱くなるわけです(^^;

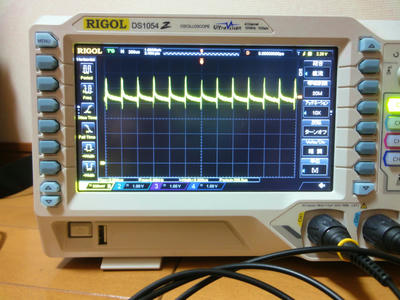
オシロスコープの波形ではよくわかりませんでした(^^;
さて、一応、
某所でちゃんとした電源と測定器を使って、ACS712のデータを取りました。
こちら。
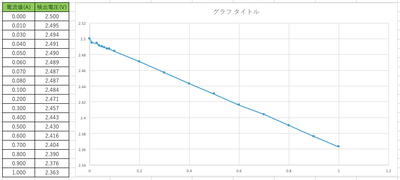
基準電流発生器が見つからなかったので、直流電源の定電流モードを使って、
DMMの電流レンジで電流値を合わせながら測定しました。
そこそこリニアリティはありそうですね。
数十mAクラスは、数mVの変化しか見えないので、オシロスコープではちょっと見えなさそう。
(結果的に、見えませんでした・・・アンプで増幅させないとダメですね。)
DCC電源を入れた瞬間、PWMを発生させた瞬間にギュンとサーボモータが動いてしまうので、
対策しないとダメです・・・
せっかく、光ファイバロッド(^^;直したのに、また千切っちゃいました・・・
ゼムクリップを伸ばしたロッドを試してみましたが、ロット自体を垂直駆動ができないと
うまくパンタグラフを上下させる事ができませんでした。
パンタグラフもパンタスパーク用にLEDをアロンアルファでくっつけたやつなので、
可動がスムーズでないので、新品を買ってきてから再トライしたほうがよさそうです。
■やった事
サーボモーターにトルクを掛けた時の電流波形を取得する。
■わかった事
トルクを掛けている時は、5V-100mA以上流れている事。
波形ではイマイチ分からなかった。
■次やる事
SmileFunctionDecoder用サーボモータ用スケッチのバグ取り。
以前にAllegroのACS712というホール素子タイプの電流センサをゲットしました。
検出回路と絶縁されているので、PWM波形と電流を一緒に観測する事が
できたりして、色々便利そうです。
・全体的な出力誤差 1.5% (TA = 25°C) 結構悪い・・・ホビーユースという事で・・・
・1.2 mΩ の内部導体抵抗 すごく低いので良いです。
・5.0 V、単一電源動作 電源は5Vだけで良いので、便利です。
・ほぼゼロの磁気ヒステリシス
0Aで、VIOUT端子に2.5Vが出力されています。
↓アマゾンで買えます。レンジが色々あるのですが、5Aタイプが良いかな。
ごちゃごちゃしていますが、SmileFunctionDecoderにサーボモータの
HK-5320の電源ラインに、ACS712電流センサを割り込ませてあります。
VIOUTに電圧テスターと、デジタルオシロで波形を観測しています。
ピーと音がするACアダプタだなーと思って、5Vラインを見たら、
リップルのすごいこと・・・
負荷が軽いから、こんなもんでしょうか・・・↓これを使うのをやめて、もう一つ5Vの
ACアダプタがあったので、そっちを使いました。
もう一個のACアダプタは若干5Vを超えているので、0A時にVIOUT端子は2.780Vでした。
サーボモータを手でトルクをかけて「み゛ー」とさせると、2.793Vになります。
ACS712は、185mVで1Aなので、軽く100mA以上流れています(^^;
テスターは実効値表示なのでピーク電流はもっと流れているでしょう・・・
SmileFunctionDecoderの三端子レギュレータが熱くなるわけです(^^;
オシロスコープの波形ではよくわかりませんでした(^^;
さて、一応、
某所でちゃんとした電源と測定器を使って、ACS712のデータを取りました。
こちら。
基準電流発生器が見つからなかったので、直流電源の定電流モードを使って、
DMMの電流レンジで電流値を合わせながら測定しました。
そこそこリニアリティはありそうですね。
数十mAクラスは、数mVの変化しか見えないので、オシロスコープではちょっと見えなさそう。
(結果的に、見えませんでした・・・アンプで増幅させないとダメですね。)
DCC電源を入れた瞬間、PWMを発生させた瞬間にギュンとサーボモータが動いてしまうので、
対策しないとダメです・・・
せっかく、光ファイバロッド(^^;直したのに、また千切っちゃいました・・・
ゼムクリップを伸ばしたロッドを試してみましたが、ロット自体を垂直駆動ができないと
うまくパンタグラフを上下させる事ができませんでした。
パンタグラフもパンタスパーク用にLEDをアロンアルファでくっつけたやつなので、
可動がスムーズでないので、新品を買ってきてから再トライしたほうがよさそうです。
 [1回]
[1回]
PR
ブログ内検索
カテゴリー
最新記事
(12/31)
(12/31)
(12/29)
(12/23)
(12/18)
リンク
プロフィール
HN:
あやのすけ
性別:
非公開
無題
さーぼですが、電源投入時に動くのは、サーボの指令信号を強めにプルアップすると抑えられます。マイコンがオープンのときにLowが入るので入力が入ったと勘違いするようでダメみたいです。
無題
void setup()の最後のところで、
analogWrite(O4, map(initDeg,0,90, zeroDeg, ninetyDeg)); // 起動時初期角度に設定
を入れてある為に、最後電源を切った時の角度と大きく
ずれていると、よくないみたいです。
なので、角度の最終値を常に、EEP-ROMに書き出しておいて、
立ち上げ時は角度を見て初期設定をしてみようと思います。